Bài 22: Hình Học Cơ Bản¶
Tác giả: FPTOJ Team
Nội dung tham khảo từ: VNOI Wiki - Hình học tính toán
1. Điểm và Vector¶
Bản chất vấn đề¶
Trong mặt phẳng Oxy, một điểm \(P\) được biểu diễn bằng cặp tọa độ \((x, y)\). Một vector \(\vec{AB}\) là phép dịch chuyển từ điểm \(A\) đến điểm \(B\), có thành phần \((B.x - A.x,\ B.y - A.y)\).
Vector không phụ thuộc vào vị trí bắt đầu — hai vector cùng phương và độ dài thì bằng nhau dù ở đâu trên mặt phẳng.
Tư duy cốt lõi¶
Mọi phép toán hình học trong competitive programming đều quy về hai phép toán trên vector: tích vô hướng (dot product) và tích có hướng (cross product). Nắm vững hai phép này là chìa khóa để giải hầu hết bài toán hình học cơ bản.
Cấu trúc dữ liệu cơ bản¶
2. Tích vô hướng (Dot Product)¶
Bản chất vấn đề¶
Cho hai vector \(\vec{A} = (A.x,\ A.y)\) và \(\vec{B} = (B.x,\ B.y)\). Tích vô hướng là một số vô hướng:
Về mặt hình học:
trong đó \(\theta\) là góc giữa hai vector.
Tư duy cốt lõi¶
Dấu của tích vô hướng cho biết quan hệ góc giữa hai vector:
- \(\vec{A} \cdot \vec{B} > 0\): góc nhọn (\(\theta < 90°\)) — cùng hướng
- \(\vec{A} \cdot \vec{B} = 0\): vuông góc (\(\theta = 90°\))
- \(\vec{A} \cdot \vec{B} < 0\): góc tù (\(\theta > 90°\)) — ngược hướng
Phân tích tính đúng đắn¶
Từ công thức \(\vec{A} \cdot \vec{B} = |\vec{A}| \cdot |\vec{B}| \cdot \cos\theta\), vì \(|\vec{A}| \geq 0\) và \(|\vec{B}| \geq 0\), dấu của tích vô hướng hoàn toàn phụ thuộc vào \(\cos\theta\). Hàm cosine dương khi \(\theta \in (0°, 90°)\), âm khi \(\theta \in (90°, 180°)\), và bằng 0 khi \(\theta = 90°\).
Đánh giá độ phức tạp¶
Tính tích vô hướng: \(O(1)\).
Code¶
Ứng dụng¶
- Kiểm tra hai vector vuông góc:
dot(A, B) == 0 - Tính góc giữa hai vector: \(\theta = \arccos\left(\dfrac{\vec{A} \cdot \vec{B}}{|\vec{A}| \cdot |\vec{B}|}\right)\)
- Chiếu điểm lên đường thẳng
3. Tích có hướng (Cross Product)¶
Bản chất vấn đề¶
Cho hai vector \(\vec{A} = (A.x,\ A.y)\) và \(\vec{B} = (B.x,\ B.y)\). Tích có hướng (trong 2D) là một số vô hướng:
Giá trị này bằng diện tích có dấu của hình bình hành tạo bởi \(\vec{A}\) và \(\vec{B}\).
Tư duy cốt lõi¶
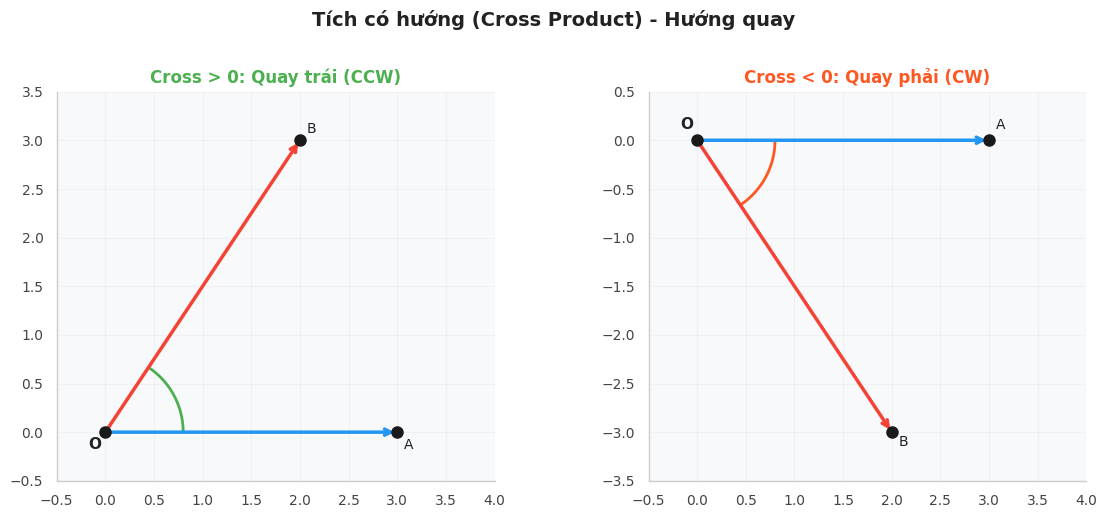
Dấu của tích có hướng cho biết hướng quay từ \(\vec{A}\) sang \(\vec{B}\):
- \(\vec{A} \times \vec{B} > 0\): \(\vec{B}\) nằm bên trái \(\vec{A}\) (quay ngược chiều kim đồng hồ — CCW)
- \(\vec{A} \times \vec{B} = 0\): \(\vec{A}\) và \(\vec{B}\) thẳng hàng (collinear)
- \(\vec{A} \times \vec{B} < 0\): \(\vec{B}\) nằm bên phải \(\vec{A}\) (quay theo chiều kim đồng hồ — CW)
Hình dung đơn giản: khi quẹo xe từ hướng \(\vec{A}\) sang \(\vec{B}\), cross > 0 là quẹo trái, cross < 0 là quẹo phải, cross = 0 là đi thẳng.
Phân tích tính đúng đắn¶
Xét hệ tọa độ chuẩn (x sang phải, y lên trên). Vector \(\vec{A} = (1, 0)\) và \(\vec{B} = (0, 1)\) cho \(\vec{A} \times \vec{B} = 1 > 0\), đúng vì \(\vec{B}\) nằm bên trái \(\vec{A}\). Ma trận \([\vec{A} | \vec{B}]\) có định thức dương tương ứng với phép biến đổi bảo toàn hướng (orientation-preserving).
Đánh giá độ phức tạp¶
Tính tích có hướng: \(O(1)\).
Code¶
4. Khoảng cách¶
Bản chất vấn đề¶
Khoảng cách Euclid giữa hai điểm \(A\) và \(B\):
Trong nhiều bài toán, ta chỉ cần so sánh khoảng cách nên dùng khoảng cách bình phương để tránh hàm sqrt và sai số số thực.
Code¶
5. Xác định hướng quay (Orientation)¶
Bản chất vấn đề¶
Cho ba điểm \(A\), \(B\), \(C\). Hỏi khi đi từ \(A \to B \to C\), hướng quay là gì? Ta tính:
- \(\text{val} > 0\): CCW (quẹo trái)
- \(\text{val} = 0\): thẳng hàng
- \(\text{val} < 0\): CW (quẹo phải)
Tư duy cốt lõi¶
Đây là phép toán nền tảng cho hầu hết bài toán hình học: kiểm tra đoạn thẳng cắt nhau, xây dựng bao lồi, kiểm tra điểm trong đa giác. Orientation chính là "nguyên tử" của hình học tính toán.
Phân tích tính đúng đắn¶
\(\vec{AB} \times \vec{AC}\) tính diện tích có dấu của tam giác \(ABC\). Nếu \(C\) nằm bên trái đường thẳng \(AB\), diện tích có dấu dương (CCW). Nếu bên phải, âm (CW). Nếu trên đường thẳng, bằng 0.
Đánh giá độ phức tạp¶
\(O(1)\) cho mỗi lần kiểm tra.
Code¶
6. Kiểm tra điểm nằm trên đoạn thẳng¶
Bản chất vấn đề¶
Khi ba điểm \(A\), \(B\), \(P\) thẳng hàng (orientation = 0), ta cần kiểm tra \(P\) có nằm trên đoạn \(AB\) không. Điều kiện: tọa độ của \(P\) phải nằm trong hình chữ nhật bao quanh \(A\) và \(B\).
Code¶
7. Kiểm tra hai đoạn thẳng cắt nhau¶
Bản chất vấn đề¶
Cho hai đoạn \(AB\) và \(CD\). Hỏi chúng có giao điểm không?
Tư duy cốt lõi¶
Hai đoạn \(AB\) và \(CD\) cắt nhau khi và chỉ khi:
- \(C\) và \(D\) nằm ở hai phía khác nhau của đường thẳng \(AB\)
- \(A\) và \(B\) nằm ở hai phía khác nhau của đường thẳng \(CD\)
Điều kiện (1) và (2) phát hiện bằng cách kiểm tra dấu của cross product. Ngoài ra, cần xét trường hợp đặc biệt khi các điểm thẳng hàng (cross = 0) và nằm trên đoạn.
Phân tích tính đúng đắn¶
Gọi \(d_1 = \vec{AB} \times \vec{AC}\), \(d_2 = \vec{AB} \times \vec{AD}\). Nếu \(d_1\) và \(d_2\) khác dấu, \(C\) và \(D\) nằm hai phía khác nhau của \(AB\). Tương tự với \(d_3 = \vec{CD} \times \vec{CA}\), \(d_4 = \vec{CD} \times \vec{CB}\).
Khi \(d_1 = 0\) và \(C\) nằm trên đoạn \(AB\), hai đoạn cắt nhau tại \(C\) (trường hợp collinear).
Đánh giá độ phức tạp¶
\(O(1)\).
Code¶
8. Diện tích tam giác¶
Bản chất vấn đề¶
Diện tích tam giác \(ABC\) có thể tính bằng tích có hướng:
Ngoài ra, khi biết ba cạnh \(a\), \(b\), \(c\), dùng công thức Heron:
Tư duy cốt lõi¶
Công thức cross product nhanh và chính xác hơn Heron vì không cần tính căn bậc hai hai lần. Dùng Heron khi chỉ biết độ dài ba cạnh.
Đánh giá độ phức tạp¶
Cả hai cách: \(O(1)\).
Code¶
9. Diện tích đa giác (Shoelace Formula)¶
Bản chất vấn đề¶
Cho đa giác có \(N\) đỉnh \((x_1, y_1), (x_2, y_2), \ldots, (x_N, y_N)\) được liệt kê theo thứ tự (CW hoặc CCW). Diện tích được tính bằng công thức Shoelace:
trong đó chỉ số modulo \(N\) (đỉnh \(N\) quay về đỉnh \(0\)).
Tư duy cốt lõi¶
Công thức Shoelace thực chất là tổng diện tích có dấu của các tam giác \((O, P_i, P_{i+1})\) với \(O\) là gốc tọa độ. Các phần dương và âm tự triệt tiêu, chỉ còn lại diện tích đa giác.
Phân tích tính đúng đắn¶
Mỗi thành phần \(x_i \cdot y_{i+1} - x_{i+1} \cdot y_i\) là cross product của hai vector \((x_i, y_i)\) và \((x_{i+1}, y_{i+1})\), tức gấp đôi diện tích có dấu tam giác \(OP_iP_{i+1}\). Tổng có dấu cho đúng diện tích đa giác bất kể đỉnh theo CW hay CCW, vì ta lấy giá trị tuyệt đối.
Đánh giá độ phức tạp¶
\(O(N)\) với \(N\) là số đỉnh.
Code¶
10. Khoảng cách từ điểm đến đường thẳng và đoạn thẳng¶
Bản chất vấn đề¶
- Đường thẳng đi qua \(A\) và \(B\): khoảng cách từ \(P\) đến đường thẳng là độ cao của tam giác \(PAB\) ứng với đáy \(AB\):
- Đoạn thẳng \(AB\): khoảng cách từ \(P\) là khoảng cách nhỏ nhất từ \(P\) đến mọi điểm trên đoạn. Nếu hình chiếu \(P'\) của \(P\) lên đường thẳng \(AB\) nằm trên đoạn, kết quả bằng khoảng cách đến đường thẳng. Nếu không, kết quả là khoảng cách đến đầu mút gần nhất.
Tư duy cốt lõi¶
Với đoạn thẳng, ta dùng phép chiếu: tính tham số \(t = \dfrac{\vec{AP} \cdot \vec{AB}}{|\vec{AB}|^2}\). Nếu \(t \in [0, 1]\), hình chiếu nằm trên đoạn. Nếu \(t < 0\), điểm gần nhất là \(A\). Nếu \(t > 1\), điểm gần nhất là \(B\).
Phân tích tính đúng đắn¶
Phép chiếu vector \(\vec{AP}\) lên \(\vec{AB}\) cho tỷ lệ \(t\) dọc theo đoạn. Giới hạn \(t\) trong \([0, 1]\) đảm bảo ta chỉ xét điểm trên đoạn, không ra ngoài.
Đánh giá độ phức tạp¶
Cả hai phép tính: \(O(1)\).
Code¶
11. Điểm trong đa giác (Point in Polygon)¶
Bản chất vấn đề¶
Cho đa giác (lồi hoặc không lồi) và một điểm \(P\), xác định \(P\) có nằm trong đa giác không.
Tư duy cốt lõi¶
Phương pháp Ray Casting (Tia đếm): Vẽ một tia ngang từ \(P\) sang phải vô cực. Đếm số lần tia cắt cạnh đa giác.
- Số lần cắt lẻ → \(P\) nằm trong đa giác
- Số lần cắt chẵn → \(P\) nằm ngoài đa giác
Với đa giác lồi, ta có cách nhanh hơn: kiểm tra \(P\) nằm cùng phía (cùng dấu cross product) với tất cả các cạnh.
Phân tích tính đúng đắn¶
Ray Casting hoạt động vì mỗi lần tia đi từ ngoài vào trong hoặc ngược lại, trạng thái "trong/ngoài" đổi. Tổng số lần đổi là lẻ khi bắt đầu từ ngoài và kết thúc trong, hoặc ngược lại.
Với đa giác lồi, một điểm nằm trong khi và chỉ khi nó nằm bên trong mọi cạnh (vì đa giác lồi là giao của nửa mặt phẳng).
Đánh giá độ phức tạp¶
- Ray Casting (đa giác bất kỳ): \(O(N)\)
- Kiểm tra đa giác lồi: \(O(N)\)
Code — Ray Casting (mọi đa giác)¶
Code — Đa giác lồi (dùng cross product)¶
12. Lưu ý quan trọng¶
- So sánh số thực: Không dùng
==. Dùngabs(a - b) < 1e-9(epsilon). - Tràn số: Cross product với tọa độ nguyên → dùng
long long. Với tọa độ thực → dùngdouble. - Thứ tự đỉnh: Đa giác cho theo CW hay CCW ảnh hưởng dấu của cross product. Luôn xác định rõ trước khi code.
- Precision: Hình học thường yêu cầu precision cao. Tránh phép trừ hai số gần nhau (cancellation).
13. Bài tập luyện tập¶
| Bài | Nền tảng | Độ khó | Kiểu bài tập (Bản chất) |
|---|---|---|---|
geo-orient |
Hướng rẽ của Robot | ⭐ | Cross product (Orientation) |
geo-dist2 |
Bình phương khoảng cách | ⭐ | Khoảng cách Euclid |
geo-colinear |
Ba ngôi sao thẳng hàng | ⭐ | Cross product (Collinear) |
geo-seg-int |
Mạng lưới đường ống | ⭐⭐ | Đoạn thẳng cắt nhau |
geo-tri-area |
Mảnh đất hình tam giác | ⭐⭐ | Diện tích tam giác |
geo-poly-area |
Khu bảo tồn thiên nhiên | ⭐⭐ | Diện tích đa giác (Shoelace) |
geo-p2seg |
Trạm phát sóng wifi | ⭐⭐⭐ | Khoảng cách điểm-đoạn thẳng |
geo-pip |
Máy bay không người lái | ⭐⭐⭐ | Điểm trong đa giác lồi |
geo-point-on-seg |
Điểm trên đoạn thẳng | ⭐ | Điểm nằm trên đoạn |
geo-tri-type |
Phân loại tam giác | ⭐⭐ | Phân loại tam giác (vuông/nhọn/tù) |
geo-poly-convex |
Kiểm tra đa giác lồi | ⭐⭐ | Đa giác lồi |
geo-poly-clock |
Chiều kim đồng hồ | ⭐⭐ | Hướng đa giác |
geo-line-dist |
Khoảng cách hai đường thẳng | ⭐⭐ | Khoảng cách đường thẳng song song |
Bài viết liên quan¶
Tài liệu tham khảo¶
- VNOI Wiki - Hình học tính toán
- CP-Algorithms - Geometry
- Topcoder - Geometry Concepts
- USACO Guide - Geometry
- YouTube - Geometry for CP (Errichto)
Bài tiếp theo: Stack Nâng Cao →