Bài 28: Bao Lồi (Convex Hull)¶
Tác giả: FPTOJ Team
Nội dung tham khảo từ: VNOI Wiki - Bao lồi, CP-Algorithms
Bản chất vấn đề¶
Bao lồi là gì?¶
Cho \(N\) điểm trong mặt phẳng. Bao lồi (Convex Hull) là đa giác lồi nhỏ nhất chứa tất cả \(N\) điểm — mọi điểm đều nằm trong hoặc trên biên của đa giác này.
Ẩn dụ đơn giản: bạn có \(N\) viên kẹo rải trên bàn, lấy một sợi dây thun bọc quanh tất cả. Sợi dây sẽ tự "tì" vào những viên kẹo ở ngoài cùng. Đường dây tạo thành chính là bao lồi.

Hình minh họa bao lồi bao quanh một tập điểm
Tính chất của đa giác lồi¶
Một đa giác lồi (convex) có tính chất: với mọi cặp điểm \(A\), \(B\) nằm trong đa giác, đoạn thẳng \(AB\) hoàn toàn nằm trong đa giác. Đa giác không có phần nào "lõm" vào trong.
Ngược lại, đa giác không lồi (concave) có ít nhất một chỗ lõm — nếu nối 2 điểm trong vùng lõm, đoạn thẳng sẽ đi ra ngoài.
Các tính chất quan trọng¶
- Bao lồi là duy nhất cho một tập điểm
- Bao lồi là đa giác lồi — mọi góc trong đều \(\leq 180°\)
- Các đỉnh của bao lồi là tập con của các điểm ban đầu
- Nếu chỉ có 1 hoặc 2 điểm, bao lồi là chính các điểm đó
- Số đỉnh bao lồi \(\leq N\)
Tư duy cốt lõi¶
Công cụ nền tảng: Tích có hướng (Cross Product)¶
Trước khi vào thuật toán, bạn phải hiểu tích có hướng. Đây là phép toán nền tảng cho mọi bài toán hình học tính toán.
Định nghĩa. Cho 3 điểm \(O\), \(A\), \(B\):
Ý nghĩa hình học:
- \(\text{cross}(O, A, B) > 0\): quay trái (counter-clockwise)
- \(\text{cross}(O, A, B) = 0\): \(O\), \(A\), \(B\) thẳng hàng (collinear)
- \(\text{cross}(O, A, B) < 0\): quay phải (clockwise)
Ẩn dụ: hãy tưởng tượng bạn đang lái xe từ \(O\) đến \(A\), rồi muốn rẽ đến \(B\). cross \(> 0\) là quẹo trái, cross \(= 0\) là đi thẳng, cross \(< 0\) là quẹo phải.
Tại sao tích có hướng hoạt động?
Tích có hướng thực chất là tích có hướng (cross product) của 2 vector \(\vec{OA}\) và \(\vec{OB}\) trong không gian 2D:
với \(\theta\) là góc từ \(\vec{OA}\) đến \(\vec{OB}\). Khi \(\theta \in (0°, 180°)\) thì \(\sin\theta > 0\) (quay trái). Khi \(\theta \in (180°, 360°)\) thì \(\sin\theta < 0\) (quay phải).
Cài đặt:
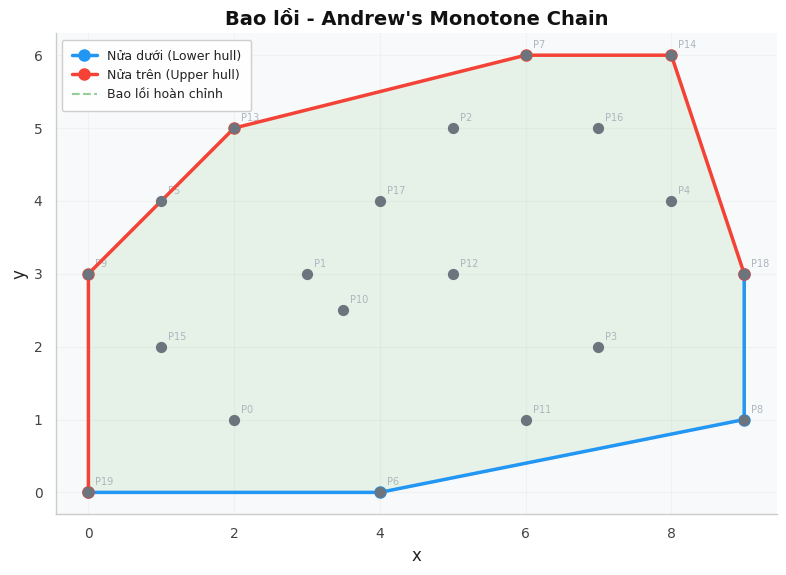
Andrew's Monotone Chain (Khuyến nghị)¶
Andrew's Monotone Chain là thuật toán xây dựng bao lồi đơn giản nhất, dễ code nhất, và ít lỗi nhất. Nếu bạn chỉ cần học 1 thuật toán bao lồi — hãy học cái này.
Ý tưởng:
- Sắp xếp tất cả điểm theo tọa độ (\(x\) tăng dần, nếu \(x\) bằng nhau thì \(y\) tăng dần)
- Xây nửa dưới (lower hull): duyệt từ trái sang phải, giữ chỉ các điểm tạo quay trái
- Xây nửa trên (upper hull): duyệt từ phải sang trái, giữ chỉ các điểm tạo quay trái
- Ghép 2 nửa lại thành bao lồi hoàn chỉnh
Tưởng tượng bạn đang "quấn dây" quanh các điểm. Bắt đầu từ điểm trái nhất, quấn xuống dưới (lower hull), rồi quấn ngược lên trên (upper hull). Tại mỗi bước, nếu dây không quay trái mà quay phải hoặc thẳng hàng, nghĩa là điểm đó nằm "bên trong" — bỏ nó đi.
Phép kiểm tra \(\text{cross} \leq 0\) nghĩa là: nếu điểm mới tạo hướng quay phải hoặc thẳng hàng so với 2 điểm cuối stack, thì điểm cuối stack không phải đỉnh bao lồi, loại bỏ.
Cài đặt:
Graham Scan (Nâng cao)¶
Graham Scan là thuật toán bao lồi cổ điển, hoạt động khác với Monotone Chain:
- Chọn điểm gốc (pivot): điểm có \(y\) nhỏ nhất (nếu bằng nhau, \(x\) nhỏ nhất)
- Sắp xếp các điểm còn lại theo góc so với pivot (dùng \(\text{atan2}\))
- Duyệt từ pivot, giữ lại chỉ các điểm tạo quay trái
Khi đã sắp xếp theo góc, các điểm được "quét" theo thứ tự vòng quanh pivot. Nếu 3 điểm liên tiếp tạo quay phải, điểm giữa nằm "bên trong" — loại bỏ nó.
Cài đặt:
Phân tích tính đúng đắn¶
Andrew's Monotone Chain¶
Bảo toàn tính lồi: Khi duyệt qua các điểm theo thứ tự \(x\) tăng dần, tại mỗi bước ta duy trì invariant: các điểm trong stack luôn tạo thành một chuỗi lồi (mọi hướng rẽ đều là quay trái). Khi thêm điểm mới \(P\):
- Nếu \(\text{cross}(\text{top-1}, \text{top}, P) > 0\): hướng rẽ là quay trái, giữ nguyên tính lồi
- Nếu \(\text{cross}(\text{top-1}, \text{top}, P) \leq 0\): hướng rẽ là quay phải hoặc thẳng hàng, điểm top nằm "bên trong" — loại bỏ để khôi phục tính lồi
Mỗi điểm bị loại bỏ không bao giờ được thêm lại (vì ta duyệt từ trái sang phải), nên thuật toán kết thúc đúng.
Tại sao ghép 2 nửa đúng? Lower hull bao gồm tất cả đỉnh bao lồi từ trái nhất sang phải nhất theo chiều dưới. Upper hull bao gồm tất cả đỉnh bao lồi từ phải nhất sang trái nhất theo chiều trên. Ghép lại, ta được toàn bộ bao lồi theo thứ tự CCW.
Graham Scan¶
Bảo toàn tính lồi: Tương tự Monotone Chain, nhưng thay vì chia thành 2 nửa, Graham Scan quét toàn bộ điểm theo góc quanh pivot. Vì các điểm đã được sắp xếp theo góc, việc loại bỏ điểm "bên trong" đảm bảo chỉ còn lại các đỉnh bao lồi.
Xử lý điểm thẳng hàng: Khi 2 điểm có cùng góc so với pivot, điểm gần hơn đứng trước. Điều này đảm bảo điểm gần (không phải đỉnh bao lồi) bị loại bỏ trước khi xét điểm xa hơn.
Đánh giá độ phức tạp¶
Andrew's Monotone Chain¶
- Sắp xếp: \(O(N \log N)\)
- Xây bao lồi: \(O(N)\) — mỗi điểm được thêm vào stack tối đa 1 lần và bị loại bỏ tối đa 1 lần
- Tổng: \(O(N \log N)\)
Graham Scan¶
- Tìm pivot: \(O(N)\)
- Sắp xếp theo góc: \(O(N \log N)\)
- Xây bao lồi: \(O(N)\)
- Tổng: \(O(N \log N)\)
So sánh 2 thuật toán¶
| Tiêu chí | Andrew's Monotone Chain | Graham Scan |
|---|---|---|
| Sắp xếp theo | Tọa độ \((x, y)\) | Góc \(\text{atan2}\) |
| Dễ code | Rất dễ | Phức tạp hơn |
| Xử lý thẳng hàng | Dễ dàng | Cần cẩn thận |
| Khuyến nghị | Nên dùng | Học để hiểu thêm |
Lưu ý và cạm bẫy¶
Điểm thẳng hàng (Collinear Points)¶
Khi nhiều điểm nằm trên cùng 1 cạnh bao lồi, bạn cần quyết định: giữ tất cả hay chỉ giữ 2 đầu.
- Dùng \(\text{cross} < 0\) (strict): giữ tất cả điểm trên cạnh, bao lồi có nhiều đỉnh "thừa"
- Dùng \(\text{cross} \leq 0\) (loại bỏ thẳng hàng): chỉ giữ 2 đầu, bao lồi gọn hơn
Khuyến nghị: Hầu hết bài toán yêu cầu loại bỏ điểm thẳng hàng, dùng \(\text{cross} \leq 0\). Nếu bài yêu cầu giữ lại, đổi thành \(\text{cross} < 0\).
Ít hơn 3 điểm¶
- 0 điểm: trả về rỗng
- 1 điểm: trả về chính điểm đó
- 2 điểm: trả về cả 2 (đoạn thẳng, không phải đa giác)
Nếu code không xử lý 2 điểm đúng cách, bao lồi có thể trả về 1 điểm (sai!).
Tọa độ nguyên vs số thực¶
Tọa độ nguyên (\(\text{long long}\)): Dùng long long cho cross product, chính xác tuyệt đối. Phạm vi \(|x|, |y| \leq 10^9\) an toàn vì cross \(= O(10^{18})\) vừa trong long long.
Tọa độ số thực (\(\text{double}\)): Dùng \(|\text{cross}| < \varepsilon\) thay vì \(\text{cross} == 0\). Epsilon thường dùng: \(10^{-9}\) hoặc \(10^{-12}\). Cẩn thận: so sánh \(\leq 0\) với double có thể sai do sai số.
Thứ tự đỉnh: CW vs CCW¶
Andrew's Monotone Chain trả về đỉnh theo thứ tự CCW (ngược chiều kim đồng hồ). Một số bài toán yêu cầu CW (theo chiều kim đồng hồ) — đảo ngược vector kết quả. Luôn kiểm tra đề bài yêu cầu thứ tự nào!
Điểm trùng nhau¶
Nếu tập điểm có nhiều điểm trùng nhau, Andrew's Monotone Chain vẫn hoạt động đúng vì sort sẽ đặt chúng cạnh nhau.
Bao lồi là đường thẳng (degenerate case)¶
Khi tất cả điểm thẳng hàng, bao lồi chỉ là 1 đoạn thẳng, không phải đa giác. Một số bài toán (tính diện tích, kiểm tra điểm trong bao lồi) sẽ trả về 0 hoặc sai với trường hợp này.
Ứng dụng thực tế¶
Diện tích bao lồi (Công thức Shoelace)¶
Sau khi có bao lồi, tính diện tích bằng công thức Shoelace:
với chỉ số modulo \(n\) (đỉnh \(n\) = đỉnh \(0\)).
Chu vi bao lồi¶
Đường kính bao lồi — Rotating Calipers¶
Bài toán: Tìm khoảng cách lớn nhất giữa 2 điểm trong tập điểm (= đường kính bao lồi).
Ý tưởng: 2 đường thẳng song song kẹp bao lồi từ 2 phía. Quay 2 đường thẳng này quanh bao lồi, tại mỗi vị trí đo khoảng cách. Khoảng cách lớn nhất là đường kính. Thực tế, ta duyệt qua các cặp đỉnh đối diện trên bao lồi. Mỗi đỉnh "đối diện" di chuyển tối đa \(O(N)\) bước, tổng \(O(N)\).
Kiểm tra điểm trong bao lồi¶
Với bao lồi lồi (đã sắp xếp CCW), kiểm tra điểm \(P\) có nằm trong bao lồi không có thể dùng binary search \(O(\log N)\):
Các thuật toán khác (tham khảo)¶
Jarvis March (Gift Wrapping)¶
- Ý tưởng: Bọc quà — từ điểm trái nhất, tìm điểm "quay trái nhất" tiếp theo, lặp lại cho đến khi quay về điểm đầu
- Độ phức tạp: \(O(N \cdot H)\) với \(H\) là số đỉnh bao lồi
- Ưu điểm: Nhanh khi \(H\) rất nhỏ (\(H \ll N\))
- Nhược điểm: Chậm khi \(H \approx N\) (trường hợp xấu nhất \(O(N^2)\))
Chan's Algorithm¶
- Ý tưởng: Kết hợp Monotone Chain và Jarvis March
- Độ phức tạp: \(O(N \log H)\) — tối ưu về mặt lý thuyết
- Thực tế: Ít khi cần dùng trong competitive programming
Bài tập luyện tập (FPTOJ)¶
| Bài | Nền tảng | Độ khó | Kiểu bài tập (Bản chất) |
|---|---|---|---|
hull-build |
Dựng bao lồi | ⭐⭐ | Andrew's Monotone Chain |
hull-perimeter |
Chu vi bao lồi | ⭐⭐ | Chu vi đa giác lồi |
hull-area |
Diện tích bao lồi | ⭐⭐ | Diện tích đa giác lồi |
hull-inside |
Kiểm tra điểm trong bao lồi | ⭐⭐⭐ | Binary search + bao lồi |
hull-diameter |
Đường kính bao lồi | ⭐⭐⭐ | Rotating Calipers |
hull-min-rect |
Hình chữ nhật bao nhỏ nhất | ⭐⭐⭐ | Rotating Calipers |
hull-max-tri |
Tam giác lớn nhất nội tiếp bao lồi | ⭐⭐⭐ | Bao lồi + ba con trỏ |
hull-points-in |
Đếm số điểm thuộc bao lồi | ⭐⭐ | Bao lồi cơ bản |
hull-max-dist-pair |
Khoảng cách lớn nhất giữa hai điểm | ⭐⭐⭐⭐ | Rotating Calipers |
hull-ship-pack |
Chu vi hình chữ nhật bao nhỏ nhất | ⭐⭐⭐⭐ | Rotating Calipers |
Gợi ý tiếp cận¶
- Mới bắt đầu: Bắt đầu với CSES Convex Hull — cài Andrew's Monotone Chain và submit
- Trung cấp: SPOJ BSHEEP — cần tính chu vi bao lồi
- Nâng cao: CF 166B — kiểm tra điểm trong bao lồi với binary search
Bài viết liên quan¶
- Bài 22: Hình học cơ bản — Tích có hướng, tích vô hướng, kiểm tra giao điểm
Tài liệu tham khảo¶
- VNOI Wiki - Bao lồi
- VNOI Wiki - Giải thích trực quan về bao lồi
- CP-Algorithms - Convex Hull
- CP-Algorithms - Rotating Calipers
- USACO Guide - Convex Hull
- YouTube - Convex Hull (Errichto)
Bài tiếp theo: Kỹ năng thi đấu →